
李宏亮 上海市金鼎学校信息科技教师。在初中阶段围绕信息科技开展跨学科课程,基于单片机、无人机、智能车等设备创设真实情境,激发学生学习兴趣,培养学生计算思维,提升学生综合能力。辅导的学生在第二十二届全国学生信息素养提升实践活动中获二等奖,在第三十九届世界头脑奥林匹克中国区决赛中获三等奖,在2021年全国青少年科技模型竞赛中获一等奖,等等。
教学背景
《义务教育信息科技课程标准(2022年版)》中明确了跨学科主题学习活动的要求,在初中的跨学科学习内容中出现了“无人机”这一内容,旨在让学生感受新兴技术的创新应用。学生在前期学习中已经掌握了无人机的通信方法,了解了挑战卡的功能,能通过编程使无人机完成起飞、降落、旋转等操作。本节课创设了无人机边境救援的情境,学生以小组合作的方式使用大疆RMTT教育无人机开展活动,活动过程中学生需要运用信息科技、数学、物理等学科知识来解决问题,切实提高学生的综合能力。
教学目标
知识与技能 了解TOF(Time of Flight)红外测距传感器、视觉传感器的原理;掌握测距模块、视觉识别相关积木的使用;分析程序算法完成搜救程序的编写;体验物理世界与数字世界的深度融合,提升信息意识。
过程与方法 在创设的无人机边境救援情境中,综合所学知识分析任务,设计算法,编程验证,迭代更新;通过解决关键子问题,完善整体方案;能采集、分析数据并修正误差,提升计算思维、数字化学习能力与创新能力。
情感态度与价值观 了解新兴技术在边防的应用,感受自主可控创新的重要性;通过搜救边防战士,感受国防科技的必要性;培养爱国情怀,增强信息社会责任感。
教学重点与难点
教学重点 TOF红外测距传感器、视觉传感器的原理及编程软件中测距模块、测距和视觉识别模块相关积木的使用。
教学难点 多学科知识综合运用实践;无人机边境救援的算法分析及程序实现。
教学过程
一、情境导入,明确任务
1.创设情境,激发情感
学生观看“戍边战士”视频,了解中国边防官兵如何用鲜血与生命筑起巍峨界碑以及边境对国家安全的重要性,激发学生的爱国情怀。
教师提出问题:同学们认为无人机能够为边境守卫工作提供什么帮助?学生小组讨论后,交流结果:无人机可以执行巡逻任务、运输物资、搜救伤员、代替战士们执行危险任务。教师由此引出项目主题:无人机边境救援。
2.细化情境,任务驱动
教师介绍无人机边境救援的模拟场地,红色区域为起飞点,绿色区域为低谷,黄色区域为不可穿越的高山,棕色区域为伤员位置所在地。在无人机飞行路径上依次放置1号、2号挑战卡用于提高定位精度;3号、4号、5号挑战卡代表伤员所在位置,其中一个伤员位置教师会提前公布。学生对场地进行观察与测量并记录数据,测量后的任务地图尺寸(俯视图)如图1所示。
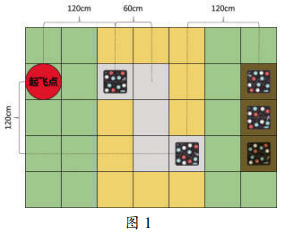
教师下发任务要求:无人机需从起飞点出发,穿越高山找到伤员,并降落在伤员位置处,接到伤员后按原路返回至起飞点。无人机搜救过程中,识别到伤员挑战卡号码时用LED点阵屏显示。
二、问题导向,支撑学习
1.初步探讨,明确知识需求
学生以小组形式初步讨论后用文字描述如何穿越高山、如何搜寻伤员,结合任务活动单中对无人机的硬件介绍寻找完成任务所需要的传感器。任务解析结果:(1)利用TOF红外测距传感器检测前方障碍物情况可以让无人机避开高山。(2)利用视觉传感器能够识别挑战卡(即确定伤员位置)。
2.学习新知,强化知识基础
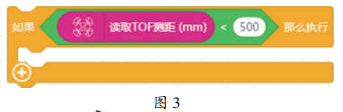
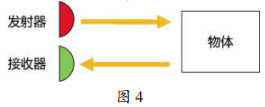
教师介绍TOF红外测距传感器(如图2)与视觉传感器的工作原理,并在Mind+软件中演示如何调用传感器进行距离、挑战卡识别。在Mind+中,“读取TOF测距(mm)”积木可以读取扩展模块上的TOF红外测距传感器的值,再结合运算模块以及条件判断语句就能实现判断距离功能。(TOF红外测距相关积木和示意图如图3、图4)

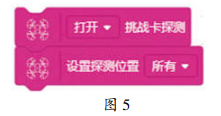
学生使用视觉传感器前,需要在Mind+中程序开始处,点击“打开”挑战卡检测并设置探测位置为“所有”。使用“挑战卡编号”积木可以读取视觉传感器识别到的挑战卡编号,“飞往挑战卡x,y,z”积木能够起到重新定位无人机当前位置的作用,并飞向指定坐标位置。(相关积木模块和视觉定位传感器位置如图5、图6)

3.深入探究,分析整体算法
学生小组合作对整个边境搜救任务进行深入讨论、规划,并用程序流程图表示。教师不断巡视,参与各个小组的讨论,并及时介入为学生提供支持与帮助。规划完成,教师邀请每个小组讲解思考过程,师生共同评判算法的可行性,提供修改意见。
4.编程实现,测试迭代更新
学生基于程序算法的分析和本节课所学知识,使用Mind+进行程序编写,使程序流程图用编程实现(图7为关键点程序),将程序上传至无人机并在搜救场景中进行测试。根据测试中不断出现的问题,逐个进行分析、改进,直至无人机能顺利搜救到伤员,记录每一个问题及解决方案,教师汇总方案供各小组交流学习。

共性问题1:无人机设置飞行距离与实际飞行距离误差较大,如设置飞行90cm,实际飞行100cm。
解决方法:根据自设的公式进行误差修正,公式为实际飞行距离×0.9=设置飞行距离,如需要实际飞行120cm,可以设置飞行108cm。旋转也存在误差,公式为实际旋转角度×1.02=设置旋转角度。
共性问题2:无人机在程序执行过程中,经常有上一个动作还没执行完成,下一个动作已经开始,程序抢跑导致飞行失败的情况。
解决方法:先预估无人机执行每一个动作需要的时间,并在该动作程序积木块后添加“等待”积木块,根据实际效果反复测试精确等待时间。如“旋转90度”需要“等待1秒”,“向前飞行120cm”需要“等待2秒”,“显示字符2”则只需要“等待0.2秒”或不需要等待。
共性问题3:我们小组借鉴了别的小组数据,但是别的小组测试成功,我们却失败了。
解决方法:电子元件的制造精度导致每一台无人机都有细微差别,学生可以借鉴别人修正误差的方法、程序的算法,但不能完全照抄别人的数据。
三、交流总结,拓展探究
1.直观展示,总结升华
教师组织学生进行“无人机边境搜救”现场展示,师生共同从项目的起因、实践的经过、最后收获的结果对活动进行总结,加深学生对自主可控的理解,增强通过自主创新应用改变生活的信心,培养爱国情怀,提升综合能力。
2.拓展探究,迭代提升
在本次项目活动中,搜救的路线已经由学生们事先探索、测量。但是实际操作中,搜救的环境并不理想,无人机将要进入的是一个未知的困境。引导学生在原有的项目背景下思考“无人机是如何判断前方有障碍物的条件下,应该往左转还是往右转,又该如何编写程序”。
教学反思
本课程关于无人机搜救伤员的情境项目,不仅迎合了学生对新兴科技、智能硬件的兴趣,体验到自主可控的重要性,还激发了学生的爱国情怀,提升了社会责任感。同时,学生经历了从理解背景、明确任务到头脑风暴、学习新知,再到解析算法、编程实现,最后不断调试直至完成任务的过程,亲身体验了物理世界与数字世界的深度融合,增强了信息意识,在实践中提升了计算思维与数字化学习创新能力。



